Plans de contrôle
Programmation graphique
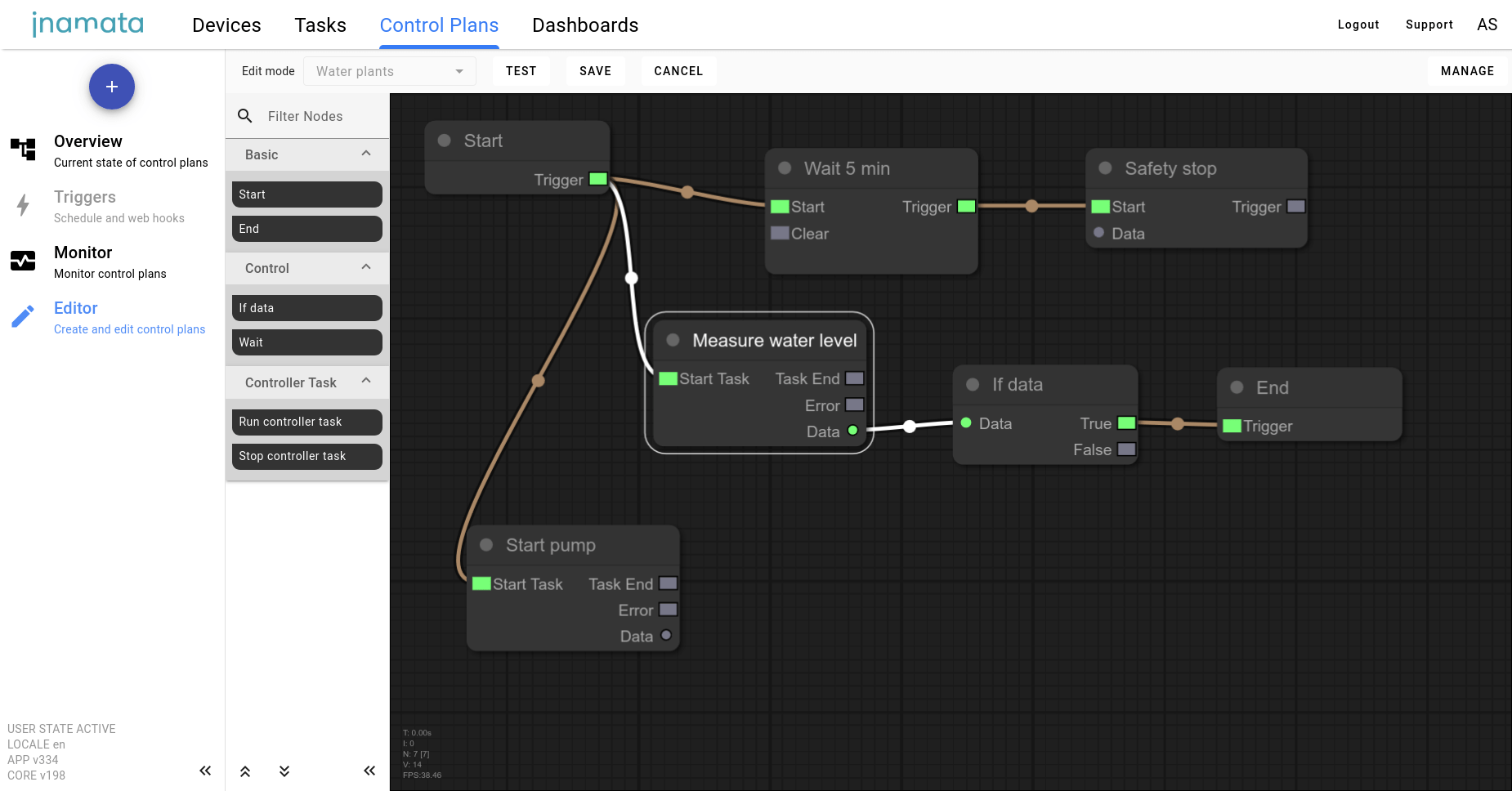
Les plans de contrôle de l’Inamata permettent de relier facilement les entrées aux actions, ce qui constitue le cœur de la programmation graphique. Interrogez ou définissez des alertes pour les capteurs, ajoutez un peu de logique pour combiner les données provenant de différentes sources et commander intelligemment les pompes et les lumières connectées à d’autres contrôleurs.
Grâce à la puissance des nœuds, la plupart des actions peuvent être accomplies avec seulement quelques-uns d’entre eux. Le comportement par défaut est défini pour les rendre intuitifs, mais il est facile de le modifier pour qu’ils agissent comme vous le souhaitez.
Pour s’assurer que tous les bogues sont éliminés, l’état du plan de contrôle est transmis en direct à votre navigateur et vous pouvez également inspecter l’état des variables du plan de contrôle. Nous sommes conscients que des erreurs peuvent toujours se produire, c’est pourquoi nous ajoutons explicitement un support pour les traiter.
Les plans de contrôle s’inspirent des éditeurs de nœuds que l’on trouve dans Node-RED et Blender. Actuellement, notre implémentation est un environnement de programmation graphique sans code, mais notre feuille de route prévoit de la faire évoluer vers un environnement à faible code.
Nos guides vous présentent les principes de base ainsi que les modèles les plus courants pour obtenir les résultats que vous souhaitez. Inspirez-vous des exemples de plans de contrôle et si vous êtes bloqué, nous sommes toujours là pour vous aider.